„Rybim okiem z lotu ptaka” – korekcja dystorsji w czasie rzeczywistym w czujnikach wizyjnych Baumer VeriSens®

Zdjęcia wykonane obiektywem typu „rybie oko” zapewniają ciekawą perspektywę, jednak zniekształcenia obrazu mogą stanowić problem w przemysłowych zastosowaniach przetwarzania obrazu. Istnieje bowiem ryzyko, że obrazy nie będą mogły zostać przeanalizowane lub spowodują błędy podczas kontroli. Dlatego dzięki korekcji zniekształceń, cieniowania i odchylenia perspektywy w czasie rzeczywistym Baumer oferuje teraz inteligentny i prosty sposób dokładnej analizy obrazów dla czujników wizyjnych VeriSens®. Dzięki tej technologii możemy uzyskać ujęcia przypominające widok poprawionych obrazów „z lotu ptaka”.
Korekcja dystorsji i cieniowania
Dystorsja jest wadą obiektywów (szczególnie z krótką ogniskową) polegającą na różnym powiększeniu obrazu w zależności od jego odległości od osi optycznej.
Czy znasz soczewki typu „rybie oko”? Niezwykle szeroki kąt widzenia pozwala uchwycić całe krajobrazy w jednym ujęciu, jednak widok dookoła - 180° ma swoją cenę. Obraz jest zaokrąglony i spływa na brzegach. Faktyczna wada ciężkich zniekształceń w fotografii działa często jako element artystyczny, jednak w systemach wizyjnych jest to duży problem.
Jak sobie z tym radzić w świecie widzenia maszynowego?
Szerokie kąty widzenia, choć może nie „rybie oczy” – często mają sens. Duży obiekt można monitorować z bliskiej odległości, zajmując tylko niewielką ilość miejsca na instalację kamery. Jednak wynikające z tego zniekształcenia obiektywu przynoszą zwykle efekt przeciwny do zamierzonego, ponieważ obiekty mają „krzywy” i nieprecyzyjny wygląd. Niepożądane odchylenia między obrazem a rzeczywistym obiektem są spowodowane nie tylko powszechnie stosowanymi soczewkami entocentrycznymi (standardowymi), znaczenie może również odegrać ułożenie kamery lub czujnika wizyjnego w stosunku do obiektu. Inny obraz powstaje, gdy obiekt musi być oglądany pod kątem lub z boku, np. aby zapewnić robotom lub ludziom nieograniczony dostęp w tym samym obszarze roboczym. Przemysłowe przetwarzanie obrazu ma na celu uzyskanie wyników odnośnie stwierdzenia jakości obiektu lub przekazanie informacji o położeniu i orientacji systemowi obsługi. W związku z tym, zniekształcony obiekt często nie nadaje się do uzyskania dokładnych wyników. W aplikacjach typu „podnieś i umieść” dokładne pozycjonowanie robota jest po prostu niemożliwe bez działań naprawczych.
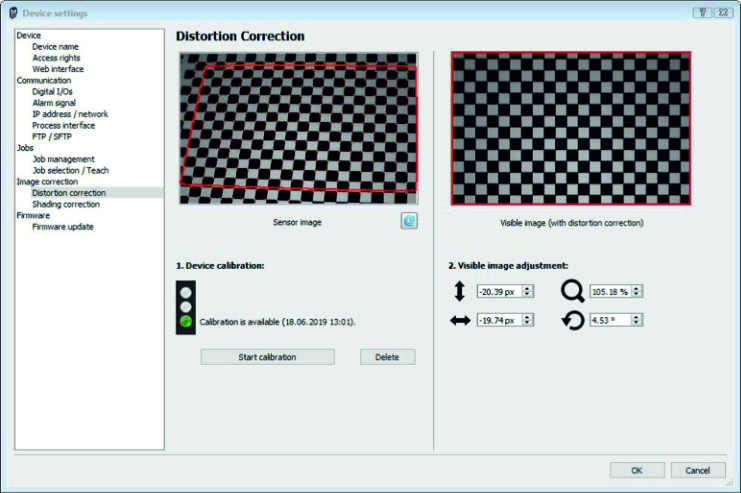
Zniekształcenia obrazu mogą być automatycznie korygowane, a współrzędne globalne skonfigurowane jednym kliknięciem myszy w programie konfiguracyjnym Application Suite, przy użyciu płytki kalibracyjnej która jest umieszczona w obszarze widzenia czujnika wizyjnego.
Widok z lotu ptaka
Jedną z prostych metod korekcji jest skorygowanie tylko współrzędnych (nie obrazu) po ich nauczeniu się w trakcie kalibrację. Problem polega na tym, że ludzie przyswajają około 80% informacji za pomocą wzroku. Skonfigurowanie aplikacji na podstawie zniekształconego obrazu i wykorzystanie tego stanu do późniejszej wizualizacji pozostaje wyzwaniem, które może powodować błędy. Prostota i łatwość obsługi mają kluczowe znaczenie w złożonej dziedzinie przetwarzania obrazu. Optymalnym rozwiązaniem jest kompleksowe skorygowanie całego obrazu za pomocą kalibracji, metod matematycznych i dużej mocy obliczeniowej.
Jak to możliwe? Jeśli znany jest idealny wzorzec obrazu, odchylenie można wyprowadzić z obrazu „oglądanego” przez czujnik wizyjny i znany szablon. Oznacza to, że nawet obrazy z bocznymi zniekształceniami, które może spowodować ukośny montaż, można skorygować matematycznie w taki sam sposób jak zniekształcenie wprowadzone przez obiektyw. Wybrane modele 700/800/900 VeriSens® z serii XF i XC obsługują korekcję zniekształceń obrazu w czasie rzeczywistym. Po skalibrowaniu obrazu za pomocą płytki kalibracyjnej czujnik wizyjny rozpoznaje warunki obrazu z pozycji instalacji, kąta widzenia, zniekształcenia obiektywu i automatycznie koryguje cały obraz. Obraz przypomina wtedy „widok z lotu ptaka”. Zadanie kontrolne jest następnie wykonywane na „idealnym” obrazie bez żadnych zniekształceń. Obiekty następnie odzyskują wygląd, jakiego spodziewałby się człowiek. Jest to proste dla użytkownika i pomaga w szybkiej i dokładnej konfiguracji aplikacji. Kalibracja to prosty i uporządkowany proces – bez potrzeby sięgania do dokumentacji. Inteligentne algorytmy działające w tle, stale sprawdzając warunki kalibracji i dostarczają informacji kiedy proces uczenia jest poprawny. Użytkownicy muszą interweniować tylko wtedy, gdy czujniki wizyjne VeriSens® potrzebują dodatkowych informacji.
Zniekształcenia obrazu mogą występować z powodu ukośnego montażu czujnika wizyjnego, a także ze względu na zniekształcenia obiektywu. Sprzyja to nieprecyzyjnej obróbce zdjęć.
Wbudowana korekcja cieniowania
Ukośny montaż może zmienić również warunki oświetleniowe aplikacji, ponieważ część źródła światła znajduje się dalej od obiektu. Z tego powodu w tym samym czasie wprowadzono opcjonalną korektę cieniowania. Aby nauczyć algorytm idealnego scenariusza, wystarczy biała kartka papieru i jedno kliknięcie myszką. W wyniku czego jest to następnie uwzględniane w procesie korekcji obrazu i dostosowuje jasność obrazu dla każdego piksela zgodnie ze scenariuszem korekcji.
Automatyczne konfigurowanie współrzędnych globalnych
Możliwość wyrównania współrzędnych czujnika wizyjnego ze współrzędnymi globalnymi to uznana cecha czujników wizyjnych VeriSens®. Funkcja ta umożliwia przetwarzanie współrzędnych na dowolne jednostki zamiast pikseli i ma szczególne znaczenie przy obsłudze aplikacji typu pomiar czy wybierz i umieść. Nauka globalnych współrzędnych korzysta z obrazu płytki kalibracyjnej do zniekształceń obrazu i wykorzystuje jej kwadratową strukturę do automatycznej konfiguracji.
Precyzyjna analiza obrazu
Właściwie skorygowany obraz jest idealną bazą dla wymagających operacji pomiarowych. Oprócz zniekształcenia obiektywu można zmniejszyć wpływ warunków perspektywy obiektu. Kontrole obecności i kompletności są łatwiejsze również w przypadkach, gdy czujnik wizyjny często musi być montowany pod kątem, aby uniknąć odbić lub ułatwić dostęp. Dzięki korekcji obrazu nie wpływa to już na przechwytywanie i sprawdzanie obiektów lub etykiet. Jeśli roboty wykorzystują przetwarzanie obrazu do orientacji, układ współrzędnych przetwarzania obrazu jest dodawany do układu współrzędnych robota, który z natury nie jest zniekształcony. Jeśli więc współrzędne układu wizyjnego zostaną odpowiednio skorygowane, wyskalowane i zorientowane, wówczas robotowi można przekazać bezpośrednie położenie obiektów. Nie ma żadnych wizualnych odchyleń między orientacją obrazu a orientacją robota. W przypadku stałego miejsca montażu czujnika wizyjnego nad robotem, przetwarzanie obrazu może zakłócać pracę robota w aplikacjach typu „podnieś i umieść”.
Czujniki wizyjne VeriSens® są w stanie uchwycić kilka obiektów jednocześnie i zapewnić robotowi inteligentne dane wejściowe. Jednocześnie możliwe jest zarówno optymalne rozmieszczenie obiektów, jak i uwzględnienie niepożądanych nakładających się na siebie detali.
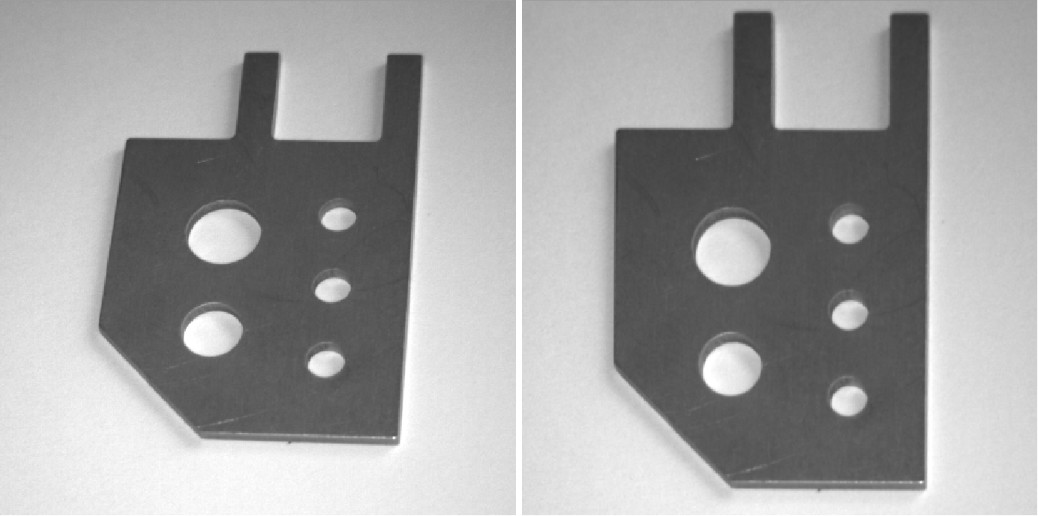
Po kalibracji, całkowicie skorygowany obraz jest dostępny dla kolejnego zadania kontrolnego (na lewo przed korekcją dystorsji; na prawo po korekcji dystorsji).
W razie dodatkowych pytań zapraszamy do kontaktu:
Michał Kassak
e-mail: michal.kassak@newtech.com.pl
tel. 694 467 161